
-
Exposed products
-
Special Deals
Discounts!
 New -17 %00 Day07 Hour24 Min28 SecAerial Photography Made Easy Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..204.84€ 245.82€Ex Tax:204.84€
New -17 %00 Day07 Hour24 Min28 SecAerial Photography Made Easy Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..204.84€ 245.82€Ex Tax:204.84€ New -16 %01 Day07 Hour24 Min28 SecAerial Photography Made Easy Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..303.20€ 360.57€Ex Tax:303.20€
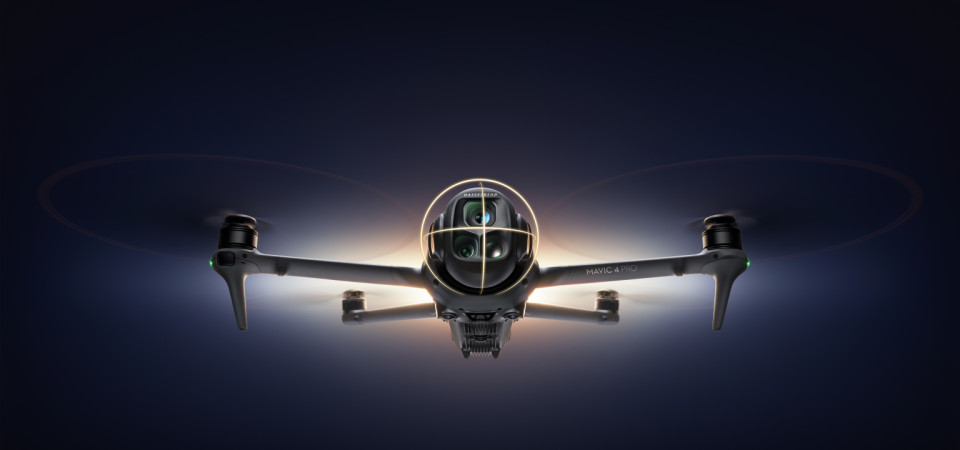
-12 %16 Day07 Hour24 Min28 SecTake it. Easy.Weighing less than 249 g, [1] Mini 4 Pro was designed for life on the go. There's no need for training or examinations in most countries..818.85€ 926.15€Ex Tax:818.85€
New -16 %01 Day07 Hour24 Min28 SecAerial Photography Made Easy Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..303.20€ 360.57€Ex Tax:303.20€
-12 %16 Day07 Hour24 Min28 SecTake it. Easy.Weighing less than 249 g, [1] Mini 4 Pro was designed for life on the go. There's no need for training or examinations in most countries..818.85€ 926.15€Ex Tax:818.85€ -
Bestsellers
HotOverview The Mavic 2 Car Charger has a maximum output power of 80W, allowing you to charge batteries while driving. It features overheating protectio..57.30€Ex Tax:57.30€
HotMonitor Mount PRO for Inspire This is a CNC machined, aluminum mount that allows you to mount any 1/4-20 monitor on to your Inpire transmitter. Use it..49.10€Ex Tax:49.10€
HotDJI Ronin-M - Flat Facing Head Camera Screw 1/4" and 3/8" (2 pcs.) (PART16)..8.93€Ex Tax:8.93€
HotFusion Upgrade Amimon Connex Fusion allows the UAV operator a much more flexible choice between size and weight to multisystem enviroment.You can conn..970.41€Ex Tax:970.41€
HotMio Damping is designed to match perfectly with the Mio gimbal and its payload where 8 silicone-filled rubber balls are used to further remove high-fr..210.57€Ex Tax:210.57€
HotAdicam Ball Mount System 75mm/100mm This set is made of aluminum which ensures high durability, stability and exceptional lightness. It is suitable fo..299.10€Ex Tax:299.10€
HotRSS Control Cable for BMCC is used to connect Remote Start/Stop Camera Port to BMCC cameras...8.11€Ex Tax:8.11€
HotConnect your IR-LOCK Sensor to the Cube autopilot. This cable provides I2C communication from IR-LOCK to the Cube via the Carrier Board, and also powe..8.11€Ex Tax:8.11€
The most advanced 5.8GHz Video Transmitter available today. Only 4 grams, and a slender 31 x 20mm, the TrampHV is also the smallest direct LiPo-powere..35.16€Ex Tax:35.16€
Connect the communication ports on the Focus Remote Controller and the Osmo - X5 Adapter using the DJI Focus - Osmo Pro/RAW Adaptor Cable. Then, you c..35.98€Ex Tax:35.98€
DJI Mini 3 Pro
![DJI Mini 3 Pro [image]](https://www.onedrone.com/store/image/cache/catalog/banners/dji_mini_3_pro_no_rc_-550x550w-200x120w.jpg)
- Less than 249 g
- Obstacle Sensing
- 4K/60fps Video
- 4K/30fps HDR Video
- 34-min Flight Time
- True Vertical Shooting
- FocusTrack
- MasterShots
- Timelapse
- and more...
-
Latest added
Latest
New1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..516.31€Ex Tax:516.31€
New1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..393.36€Ex Tax:393.36€
NewDJI Avata 2 Pro-View ComboIN THE BOX: DJI Avata 2 (1x), DJI Avata 2 Intelligent Flight Battery (3x), DJI Avata 2 Propellers (Pair) (2x), DJI Avat..885.16€Ex Tax:885.16€
NewTri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..1,737.62€Ex Tax:1,737.62€
NewTri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..2,237.62€Ex Tax:2,237.62€
NewTri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..2,934.34€Ex Tax:2,934.34€
NewIntelligent Recognition With AI,Intelligent OperationBuilt-in AI identifies vehicles, vessels, and subjects during search and rescue or routine flight..3,799.10€Ex Tax:3,799.10€
NewIntelligent Recognition With AI,Intelligent OperationBuilt-in AI identifies vehicles, vessels, and subjects during search and rescue or routine flight..5,699.10€Ex Tax:5,699.10€
NewOverviewEach propeller blade has been put under precise dynamic balancing tests to output less noise. The new safety design causes less damage to peop..16.31€Ex Tax:16.31€
NewCompact Design, Boundless FreedomWeighing less than 249 g[1], DJI Flip is as light as an apple. No training or examination is required to fly in most ..647.46€Ex Tax:647.46€
NewCompact Design, Boundless FreedomWeighing less than 249 g[1], DJI Flip is as light as an apple. No training or examination is required to fly in most ..532.70€Ex Tax:532.70€
NewCompact Design, Boundless FreedomWeighing less than 249 g[1], DJI Flip is as light as an apple. No training or examination is required to fly in most ..360.57€Ex Tax:360.57€DJI Mini 3 Pro
- Less than 249 g
- Obstacle Sensing
- 4K/60fps Video
- 4K/30fps HDR Video
- 34-min Flight Time
- True Vertical Shooting
- FocusTrack
- MasterShots
- Timelapse
- and more...
-
Special Deals
-
Consumer
-
Pro / Enterprise
-
DIY (Components)
-
FPV Racing
-
Top Brands



")

")
")
")






-150x150h.jpg)
















-1000x1000-150x150.jpg)















-150x150.png)










-320x210h.png)



-620x620h.jpg)
Featured Products

New
-17 %
00 Day
07 Hour
24 Min
28 Sec
Model: DJI-M-4K
Aerial Photography Made Easy
Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..
204.84€ 245.82€
Ex Tax:204.84€


New
-16 %
01 Day
07 Hour
24 Min
28 Sec
Model: DJI-M-4K-FMC
Aerial Photography Made Easy
Easy and intuitive for beginners, DJI Mini 4K supports one-tap takeoff and landing, Return..
303.20€ 360.57€
Ex Tax:303.20€
")
")
-12 %
16 Day
07 Hour
24 Min
28 Sec
Model: DJI-MI4-FMC
Take it. Easy.Weighing less than 249 g, [1] Mini 4 Pro was designed for life on the go. There's no need for training or examinations in most countries..
818.85€ 926.15€
Ex Tax:818.85€
-250x250w.jpg "DJI Osmo 360 Adventure Combo")

New
Brand: DJI
Model: DJI-Osmo360-AC
1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..
516.31€
Ex Tax:516.31€
-250x250w.jpg "DJI Osmo 360 Standard Combo")
New
Brand: DJI
Model: DJI-Osmo360-SC
1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..
393.36€
Ex Tax:393.36€
%20(1)-250x250w.jpg "DJI Avata 2 Pro-View Combo")

New
Model: DJI-Avata-2-PV-C
DJI Avata 2 Pro-View ComboIN THE BOX: DJI Avata 2 (1x), DJI Avata 2 Intelligent Flight Battery (3x), DJI Avata 2 Propellers (Pair) (2x), DJI Avat..
885.16€
Ex Tax:885.16€
")
")
New
Brand: DJI
Model: DJI-Mavic-4-PRO
Tri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..
1,737.62€
Ex Tax:1,737.62€
")
New
Brand: DJI
Model: DJI-Mavic-4-PRO-FMC
Tri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..
2,237.62€
Ex Tax:2,237.62€
")
New
Model: DJI-Mavic-4-PRO-CC
Tri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..
2,934.34€
Ex Tax:2,934.34€


New
Model: DJI-M4-E
Intelligent Recognition With AI,Intelligent OperationBuilt-in AI identifies vehicles, vessels, and subjects during search and rescue or routine flight..
3,799.10€
Ex Tax:3,799.10€


New
Model: DJI-M4-T
Intelligent Recognition With AI,Intelligent OperationBuilt-in AI identifies vehicles, vessels, and subjects during search and rescue or routine flight..
5,699.10€
Ex Tax:5,699.10€
-12 %
16 Day
07 Hour
24 Min
28 Sec
Model: DJI-MI4-FMC
Take it. Easy.Weighing less than 249 g, [1] Mini 4 Pro was designed for life on the go. There's no need for training or examinations in most countries..
818.85€ 926.15€
Ex Tax:818.85€
")
")
Model: DJI-Avata-2-FMC-1
FPV Flight Experience
DJI Goggles 3 has HD micro-OLED displays and low video latency. It also has Real View PiP, for awareness without removi..
819.59€
Ex Tax:819.59€
")
")
Brand: DJI
Model: DJI-M3P-FM-RCP
Flagship Tri-Camera SystemWith a 4/3 CMOS Hasselblad camera, a 70mm tele camera, and a 166mm tele camera, Mavic 3 Pro helps you create stunning works ..
2,901.56€
Ex Tax:2,901.56€

Brand: ProfiCNC/HEX
Model: HX-COR+
CubePilot- The Cube Orange + (Beta Version)
Features
1. Faster H7 SOC with 1MB ram.
2. Upgraded triple redundant IMU sensors for extra redundancy.
3...
213.03€
Ex Tax:213.03€


Brand: DJI
Model: DJI-I3
Full-frame 8K ProRes RAW/CinemaDNGFeatures an 8K sensor with internal recording of up to 8K/25fps CinemaDNG video[1]and 8K/75fps Apple ProRes RAW vide..
12,458.93€
Ex Tax:12,458.93€

Hot
Brand: DJI
Model: DJI-MA2-CC
Overview
The Mavic 2 Car Charger has a maximum output power of 80W, allowing you to charge batteries while driving. It features overheating protectio..
57.30€
Ex Tax:57.30€

Hot
Model: inspmonmont
Monitor Mount PRO for Inspire This is a CNC machined, aluminum mount that allows you to mount any 1/4-20 monitor on to your Inpire transmitter. Use it..
49.10€
Ex Tax:49.10€

Hot
Model: ronmpart16
DJI Ronin-M - Flat Facing Head Camera Screw 1/4" and 3/8" (2 pcs.) (PART16)..
8.93€
Ex Tax:8.93€

Hot
Brand: Connex
Model: AMN1711PB-02
Fusion Upgrade
Amimon Connex Fusion allows the UAV operator a much more flexible choice between size and weight to multisystem enviroment.You can conn..
970.41€
Ex Tax:970.41€

Hot
Brand: Gremsy
Model: GR-MIO-DA
Mio Damping is designed to match perfectly with the Mio gimbal and its payload where 8 silicone-filled rubber balls are used to further remove high-fr..
210.57€
Ex Tax:210.57€


Hot
Model: SKU004
Adicam Ball Mount System 75mm/100mm
This set is made of aluminum which ensures high durability, stability and exceptional lightness. It is suitable fo..
299.10€
Ex Tax:299.10€


Hot
Model: rssbmcc
RSS Control Cable for BMCC is used to connect Remote Start/Stop Camera Port to BMCC cameras...
8.11€
Ex Tax:8.11€
Top Brands
New for DJI drones
New
1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..
516.31€
Ex Tax:516.31€
New
1-Inch 360° Imaging [1]Specially designed for 360° capture, the all-new square HDR image sensor maintains the same 360° image field as a traditional 1..
393.36€
Ex Tax:393.36€
New
Tri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..
1,737.62€
Ex Tax:1,737.62€
New
Tri-Camera Imaging System, Master Every AngleExcels from wide-angle to tele. Features Dual Native ISO Fusion, RAW stacking of up to 5 frames, Free Pan..
2,237.62€
Ex Tax:2,237.62€
")
New
1″ CMOS Primary Camera
14 stops of dynamic range, [1] 3.2μm large pixel size, [2] 24mm format equivalent, and 50MP resolution, capture vast l..
900.82€
Ex Tax:900.82€
")
New
1″ CMOS Primary Camera
14 stops of dynamic range, [1] 3.2μm large pixel size, [2] 24mm format equivalent, and 50MP resolution, capture vast l..
1,155.66€
Ex Tax:1,155.66€
")
New
1″ CMOS Primary Camera
14 stops of dynamic range, [1] 3.2μm large pixel size, [2] 24mm format equivalent, and 50MP resolution, capture vast l..
1,319.59€
Ex Tax:1,319.59€
")
Special offer
Flagship Tri-Camera SystemWith a 4/3 CMOS Hasselblad camera, a 70mm tele camera, and a 166mm tele camera, Mavic 3 Pro helps you create stunning works ..
2,319.59€
Ex Tax:2,319.59€
")
Special offer
Leading Triple Camera SystemWith a 4/3 CMOS Hasselblad camera, a 70mm tele camera, and a 166mm tele camera, the Mavic 3 Pro helps you create stunning ..
1,737.62€
Ex Tax:1,737.62€
")
Complementary Camera PerformanceThe 1/1.3-inch-CMOS wide-angle camera and 3x medium tele camera deliver consistent image quality[1]and more dynamic im..
899.10€
Ex Tax:899.10€
New from Cube Ecosystem

Tiny and low power consumption enable ultra-lightweight drones application.
Enable information broadcasting (e.g. identification number, type of air..
40.90€
Ex Tax:40.90€

ProfiCNC/HEX Cube ID_CAN
Tiny and low power consumption enable ultra-lightweight drones application.
Enable information broadcasting (e.g. identifica..
77.79€
Ex Tax:77.79€

Here 3+ with I-stand
Features
Cost-effective high precision positioning, L1 band RTK support with centimeter level positioning accuracy.
Brand N..
229.43€
Ex Tax:229.43€

ProfiCNC/HEX Here GPS2 port cable for second GPS...
4.02€
Ex Tax:4.02€


This is the Base module of Here+ RTK GNSS set. For a complete RTK solution, you will need both Base and Rover modules.
What"s insideHere+ RTK Base * 1..
147.46€
Ex Tax:147.46€

Before using the HereFlow, please download the instruction from "HereFlow" section on Cubepilot.org. Thank you!..
114.67€
Ex Tax:114.67€

Herelink Airunit V1.1 - Ethernet cable RJ45
Adapter cable / connection cable from Herelink ETH port to RJ45.Length. about 15cm..
8.11€
Ex Tax:8.11€

HEXSOON EDU450 Reference Frame Excellent Frame for testing and development, teardrop arms with upward tilt.
New to Version 2
Added 4 x LEDs, mounted ..
246.64€
Ex Tax:246.64€

HEXSOON TD-650 New V2
New Features
Frame is now rectangle
Added 4x Arm LEDs
new PDB with LED connections
Pops changed to MF1503
Motors changed to 401..
573.69€
Ex Tax:573.69€

Tutorial for Precision Landing with the Cube: https://irlock.readme.io/docs Send technical/support questions to info@irlock.com Enhance your UAV fleet..
118.77€
Ex Tax:118.77€

Hot
Connect your IR-LOCK Sensor to the Cube autopilot. This cable provides I2C communication from IR-LOCK to the Cube via the Carrier Board, and also powe..
8.11€
Ex Tax:8.11€
")
FEATURES AT-A-GLANCEUp to 12-cell Lithium battery (50.4V)140A continuous current with 280A surgesPower and signal for ESCs conveniently located in cor..
286.80€
Ex Tax:286.80€
Tutorial for Precision Landing with the Cube:https://irlock.readme.io/docs Send technical/support questions to info@irlock.com
RELIABLE TARGET TRACKIN..
204.84€
Ex Tax:204.84€

Mini Carrier Board has the standardized DF17 connector which allows user to connect it to every version of the Cube flight controller. With smaller si..
90.08€
Ex Tax:90.08€

Product Description
Specification:
ProfiCNC/HEX Mini Carrier board Cable Set
Includes:
1 x Spare cable set..
16.31€
Ex Tax:16.31€

Product Description
Specification:
ProfiCNC/HEX PH 2.1 Cable Set
 Includes:
1 x Spare cable set..
25.33€
Ex Tax:25.33€

Product Description
Specification:
up to 8s 30A continuous
XT60 connectors
 Includes:
1 x Power Brick Mini(No wires, Power 2 cable is included wit..
28.61€
Ex Tax:28.61€

Pack of 10 screws for mountig the Cube...
2.38€
Ex Tax:2.38€

Profi CNC/HEX Blue Cube H7 is made in the USA in an ITAR certified Factory in Fremond, CA. This edition is aimed at military and government.
Product D..
491.72€
Ex Tax:491.72€
CubePilot- The Cube Orange + (Beta Version)
Features
1. Faster H7 SOC with 1MB ram.
2. Upgraded triple redundant IMU sensors for extra redundancy.
3...
213.03€
Ex Tax:213.03€

CubePilot- The Cube Orange + (Beta Version) Set with ADSB carrier board
Features
1. Faster H7 SOC with 1MB ram.
2. Upgraded triple redundant IMU sens..
368.77€
Ex Tax:368.77€

Prifu CNC/HEX Cube Mini – No Carrier Board included
INSIDE THE CUBE
An STM32F427 Rev 3 Flight management unit. (where the flight controller lives.)An..
147.46€
Ex Tax:147.46€











































































